咨詢熱線
400-697-1188 / 18607093785
咨詢熱線
400-697-1188 / 18607093785

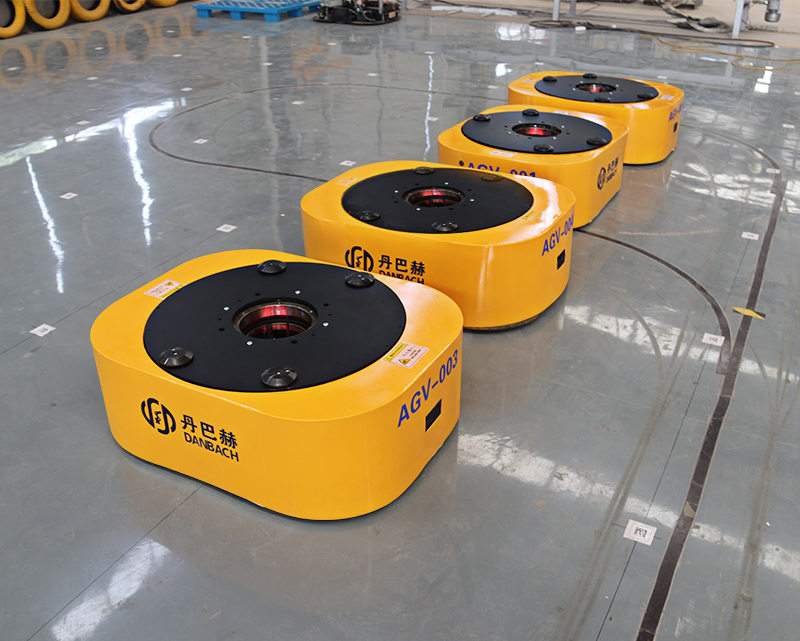
AGV 即無人搬運小車,也可稱“自動導引運輸車”,AGV 是裝備有磁導航或激光導航等導引裝置,能夠沿規定的導引路徑行駛, 具有安全保護以及各種移載功能的運輸車;具有安全保護以及各種移載功能的運輸車,工業應用中不需駕駛員的搬運車,以可充電之蓄電池為其動力來源。
A、G、V 三個字母的代表意義
A 代表 Automated,自動化,自動的。
G 代表 Guided ,指引,導引。
V 代表 Vehicle ,車輛。
AGV 概念提出在什么時代背景
20 世紀 40 年代 -60 年代(第三次工業革命 自動化時代)初是社會生產向批量化、標準化、自動化發展的重要時期 , 市場競爭 , 資源利用 , 減輕勞動強度 , 提升產品質量 , 適應批量生產需要等需求動力使生產自動化成為主流趨勢 , 進入了單機自動化階段 , 在此階段 , 各種單機自動化加工設備出現 , 并不斷擴大應用和向工業自動化縱深方向發展 ,AGV 正是在這個時期產生的。
臺 AGV 的設計單位是誰
20 世紀 50 年代中期 ,Barret 公司設計出無人駕駛卡車 , 也就是輛 AGV, 這輛 AGV 的始祖由一輛牽引式拖拉機改造而成的。和自行車一樣帶有車兜 , 在一間雜貨倉庫中沿著布置在空中的導線運輸貨物。
AGV 的定義是誰提出來的
到上世紀 50 年代末到 60 年代初期時 , 歐洲就安裝了各種型號不同水平的自動搬運車系統 , 使用了多種類型的 AGV(多數為牽引式 AGV)開始廣泛用于倉庫的自動化和工廠的作業中。
物料搬運研究所將其定義為 AGV。
臺 AGV 誕生于哪一年
輛 AGV 誕生于 1953 年,它是由一輛簡易的 AGC 產品牽引式拖拉機改造而成的,帶有車兜,在一間雜貨倉庫中沿著布置在空中的導線運輸貨物。隨后 AGV 相關研究開始起步。
AGV 的發展,經歷了哪些階段
1960 年歐洲就安裝了各種形式、不同水平的 AGVS220 套,使用了 AGV1300 多臺。到了 70 年代中期,由于微處理器及計算機技術的普及,伺服驅動技術的成熟促進了復雜控制器的改進,并設計出更為靈活的 AGV。
1972 年,科爾摩根 NDC 主導了在沃爾沃 Kalmar 工廠的套現代化的自動化導引車系統的開發和安裝。
1973 年,瑞典 VOLVO 公司在 KALMAR 轎車廠的裝配線上大量采用了 AGV 進行計算機控制裝配作業,擴大了 AGV 的使用范圍。70 年代末,歐洲約裝備了 520 個 AGV 系統,共有 4800 臺小車,
1985 年發展到10000 臺左右。其應用領域分布為:汽車工業(57%),柔性制造系統 FMS(8%) 和柔性裝配系統 FAS(44%)。
20 世紀 80 年代末,美國的 AGV 生產廠商從 1983 年的 23 家劇增至 1985 年的 74 家。1984 年,美國通用汽車公司完成了它的個柔性裝配系統 (FAS), 從此該公司就成為當時 AGV 的大用戶。
1986 年已達 1407 臺 ( 包括牽引式小車、叉車和單兀裝卸小車 ),1987 年又新增加 1662 臺。美國各公司在歐洲技術的基礎上將 AGV 發展到更為的水平,他們采用更的計算機控制系統,運輸量更大,移載時間更短,小車和控制器的可靠性更高。